PPFMap is a parallel implementation of the Point Pair Feature matching algorithm from Drost, B.. The parallel implementation is as described in the SLAM++ project.
To build this project you will need:
- Point Cloud Library (PCL 1.7) : built with CUDA support.
- Eigen library 3.0
- CUDA 5.0
- cmake 2.8
Before compiling the project, check first the cuda capability of your device.
You can set the specific capability on the CMakeLists.txt file, in the
CUDA_NVCC_FLAGS.
mkdir build
cd build
cmake ..
make
./demo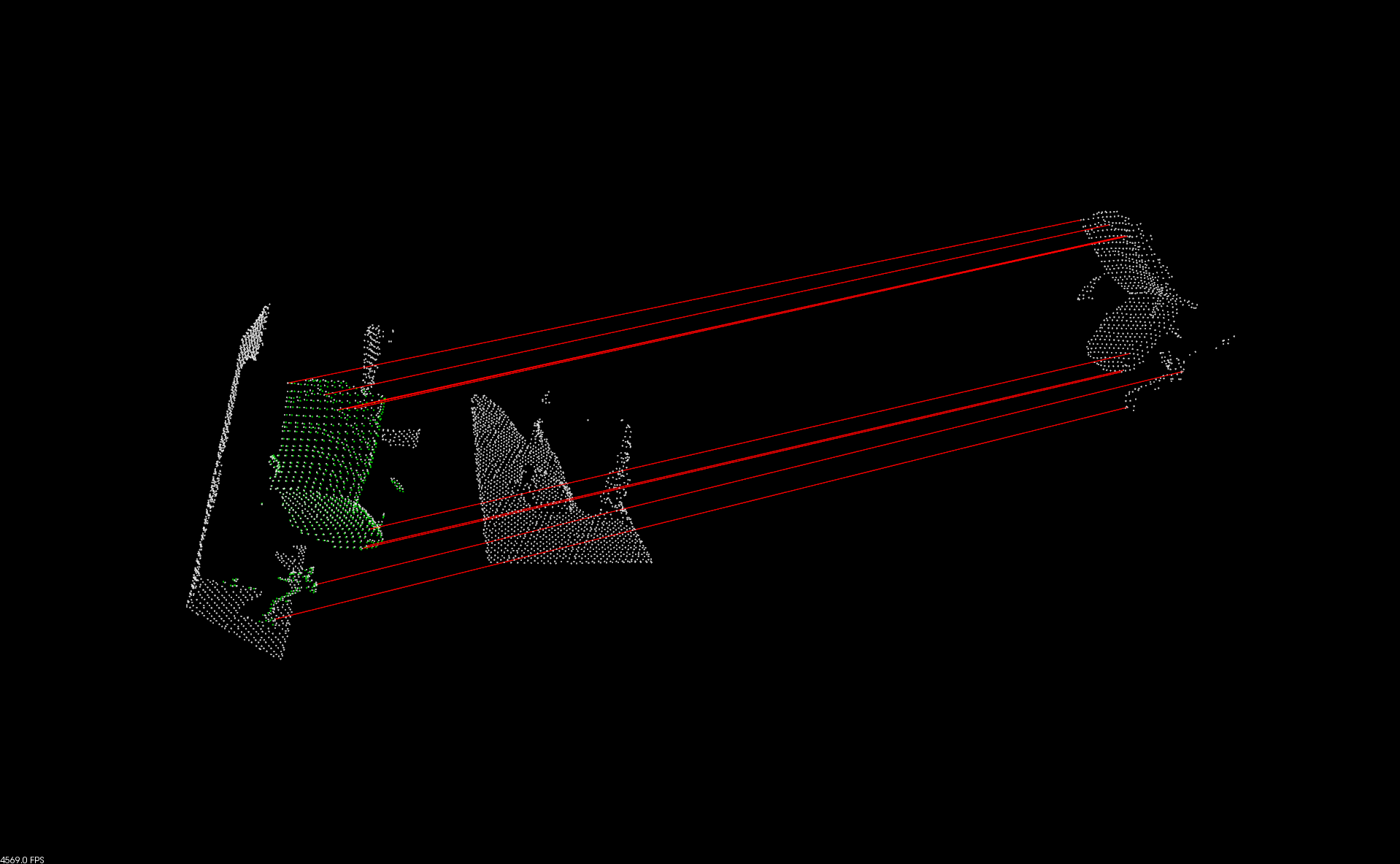
Doxygen is used for the documentation. To generate it, simply execute the
following in the build directory:
make doc