MSc Computer Graphics, Vision and Imaging Thesis
University College London
Supervised by Pr. Gabriel J. Brostow
SpiderCams have proved to enable elaborate aerial videography and are now widely used in sporting events coverage. Typically deployed over stadiums, they can go in any direction and deliver omni-directional viewpoints. In comparison to a movie crane, the SpiderCam can be easily mounted at a higher altitude, and cover a much broader range. When filming, SpiderCam operators can use it to track distant targets and create cinematic-looking shots.
However, performing sophisticated shots with a SpiderCam is hard because both the dolly position and the camera orientation have to be hand-steered. In practice, it requires the expertise of multiple operators, and thus comes at an extra cost, coordination and planning. In an effort to minimize expenses and to facilitate trajectory planning, we propose a novel software and hardware to perform autonomous motion control on the SpiderCam.
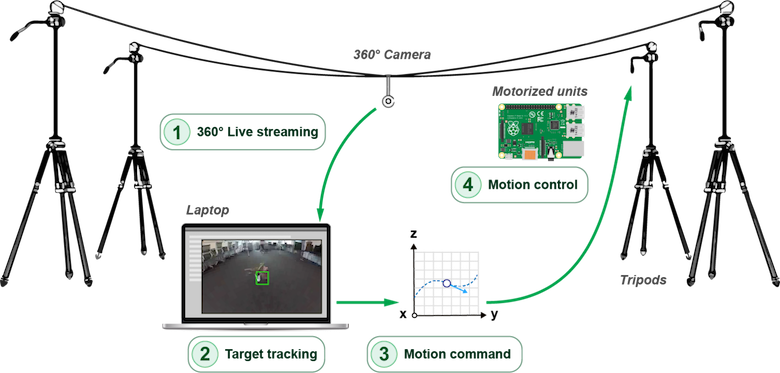
We developed a prototype that lets the SpiderCam travel along custom paths, while keeping the target in frame, with little to no supervision. More specifically, we let the user select a trajectory support, and the software delivers real-time motor commands to regulate the target position in frame. [...]